|
1.4.1.6 Динамический диапазон
Этот параметр характеризует возможность видеокамеры работать в широком
диапазоне освещенностей. Величину динамического диапазона любых
электронных устройств определяют входные каскады. В видеокамере это
ПЗС-матрица.
Динамический диапазон это максимальная разница между самым светлым и
самым темным элементом изображения, фокусируемым на ПЗС-матрице.
Динамический диапазон у видеокамеры характеризуется свойствами
ПЗС-матрицы одновременно воспринимать сигнал с максимальной и
минимальной яркостью. В идеальном случае при бесконечно большем
динамическом диапазоне у видеокамеры ей не нужен объектив с диафрагмой,
регулирующей количество света, попадающего на ПЗС-матрицу. Но в реальной
действительности динамический диапазон «снизу» ограничен уровнем
собственных шумов, а «сверху» – максимальным уровнем яркости, который
приводит к растеканию электронов по поверхности ПЗС-матрицы (блюминг).
Не совсем корректно с точки зрения параметра видеокамеры, но в качестве
примера динамический диапазон можно увидеть и в каждой строке
видеосигнала. Например, на рис. 41 видно, что сигнал имеет значительно
большую динамику, чем динамический диапазон камеры.
Сигнал с низким уровнем освещенности находится в области собственных
шумов камеры и на экране не виден. Если уровень собственных шумов
уменьшить, то «замаскированный» шумами сигнал будет виден на мониторе.
Но это произойдет только в том случае, если видеокамера будет иметь
меньший уровень собственных шумов или большее отношение сигнал/шум.
Существует и другая формулировка динамического диапазона, которая часто
используется у фотографов, но которая может иметь практическое
применение и в CCTV.
Динамический диапазон – это максимальное количество Ф-стопов, которое
может передать видеокамера.
Иными словами динамический диапазон это, сколько ступеней градаций
яркости может зафиксировать видеокамера, при условии, что каждая
градация яркости отличается от соседней на lg2. Разница между двумя
соседними значениями диафрагмы, например 5.6 и 8 (уменьшение светового
потока в 2 раза) как раз и будет равна одному Ф-стопу.
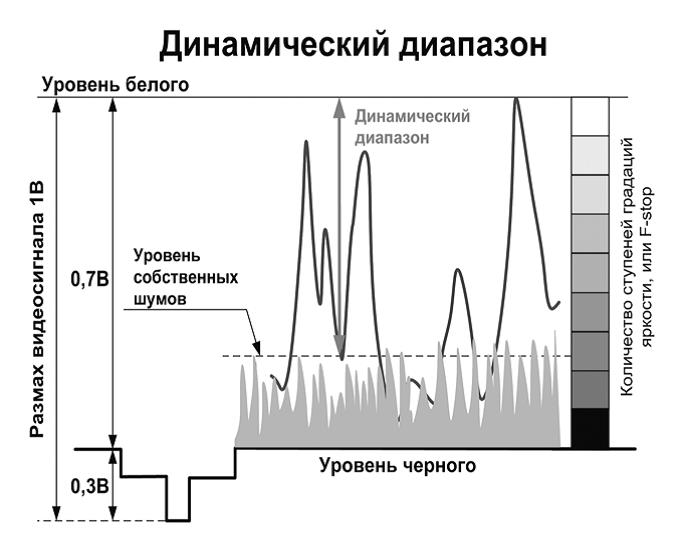
Рис. 41 - Определение динамического диапазона
Чем меньше динамический диапазон у камеры, тем больше информации мы
теряем в области слабой освещенности.
Следует помнить, что объект может содержать как ярко освещенные участки,
так и глубокие тени, и желательно, чтобы все их оттенки отображались на
сформированном ПЗС-матрице изображении.
Но, говоря о динамическом диапазоне оборудования не следует забывать,
что существует еще и динамический диапазон изображения, которое
формирует видеотракт.
В CCTV динамический диапазон конечного продукта – изображения, как
параметр почти не используется хотя динамический диапазон отдельных
элементов видеотракта – видеокамер присутствует, но на этом все и
заканчивается. Это приводит к тому, что при проектировании CCTV
отсутствует возможность прогнозировать качество получаемого изображения,
оперировать характеристиками изображения при проектировании, а
следовательно и управлять этим качеством при моделировании видеосистем.
В связи с этим проектирование CCTV «ушло» от изображения и остановилась
на рисовании секторов наблюдения ни чем не отличающихся от секторов ИК
датчиков в охранной сигнализации.
В CCTV изображение формируется на экране монитора. Для компьютерных
систем, работающих под Windows количество возможных цветов красного (R),
или зеленого (G) или синего (B) находится в диапазоне от 0 – 255, т.е.
составляет 16 миллионов цветов. Во всей этой цветовой палитре, когда R=G=B
появляется оттенок серого. Общее количество оттенков серого или градаций
серого в цветовой палитре 256. Если у нас режим экрана 65 536 цветов, то
мы имеем 32 градации серого, а если изображение выводится в режиме
экрана 256 цветов, то количество градаций серого может быть от 16 до 256
и зависит от используемой палитры, заложенной в Windows или созданной
программистами специально для решения поставленных задач [12]. Это
означает, что кроме ярких и темных мест в изображении еще имеется много
промежуточных градаций так называемых полутонов, количество которых
определяется, выбранным режимом экрана. Наличие в изображение большего
их количества делает его более художественным, живым, сочным и
увеличивает разборчивость элементов изображения. Чем больше динамический
диапазон изображения, тем большим количеством градаций серого “оно
создается”. Причем для мультиэкрана цвета элементов изображения не
соответствуют их реальному значению, а предопределены опять же палитрой
Windows. Какая реально палитра используется в компьютерных системах
видеонаблюдения наверно известно только программистам, создающих
программное обеспечение.
В связи с этим, какое бы количество градаций серого не присутствовало в
изображении объекта, расположенного перед камерой, все равно, пройдя,
через видеотракт их количество на мониторе будет определяться выбранным
режимом экрана.
Если для отображаемой на объекте сцены диапазон градаций серого, выходит
за пределы динамического диапазона монитора, то он (динамический
диапазон) относительно реального изображения будет «сжат» до возможности
монитора, а точнее - выбранного режима экрана.
Если видеокамера или любой элемент в видеотракте оцифровывает
изображение с помощью АЦП имеющего разрядность больше 8 бит, то
количество градаций серого будет уменьшено до 8 бит путем приведения их
к ближайшим значениям градаций серого монитора.
Поскольку динамический диапазон и контраст тесно связанных друг с другом,
то на рис. 42 представлен график, который поможет, определить один из
параметров, зная другой.
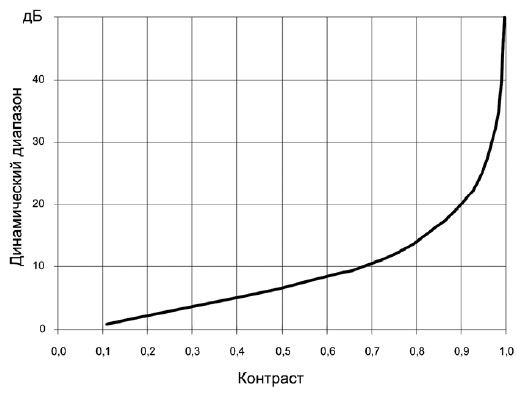
Рис. 42 - Взаимосвязь динамического диапазона и контраста
Этот график построен для 256 градаций серого при условии, что шумы на
изображении отсутствуют.
Но, рассуждая о градациях серого, которые способен передать монитор, не
следует забывать и о том, что человеческое зрение имеет значительно
меньший диапазон различимых градаций. В бытовом телевидении по
экспертным оценкам его количество было определено исходя из порога, при
котором человек еще замечает разницу в двух соседних значениях серого.
Поэтому количество градаций серого, в результате экспертных оценок
составляет величину от 80 до 130 при средней яркости свечения экрана 40
кд/кв.м. [11]. При увеличении яркости свечения экрана количество
различимых градаций серого увеличивается.
Но в каком виде должен быть представлен динамический диапазон
изображения? Правильнее было бы использовать динамический диапазон в уже
устоявшихся значениях - децибелах (Дб). Но децибел отражает логарифм
отношения напряжения или тока и в зависимости от этого используется
сомножитель при логарифме равный 20 или 10 соответственно. Между
изменяющимися значениями градаций серого на экране монитора вроде бы нет
никаких изменений напряжения или тока. Однако существует
пропорциональная зависимость изменения напряжения видеосигнала с
изменением градаций серого на экране монитора, поэтому мне кажется
возможным определять динамический диапазон изображения как:
D = 20 lg (Nmax/Nmin)
где: Nmin – минимальный уровень серого по шкале Windows (0 – 255).
Nmax – максимальный уровень серого по шкале Windows (0 – 255).
Используя эту зависимость можно вычислить максимально возможный
динамический диапазон ч/б изображения, формируемого на экране
компьютерного монитора, который равен 48,16дБ. Напомню, что динамический
диапазон сверху ограничен максимальным уровнем сигнала, а снизу уровнем
шума. В реальной картинке, которая выводится на монитор, на темных
элементах изображения присутствуют и шумы, которые необходимо так же
оценить и учесть. Поэтому правильнее за Nmin принимать
среднеквадратический уровень шума.
Теперь немного о том, как практически определить динамический диапазон
изображения, которое выводится на монитор. Для этого достаточно иметь
градационный клин (Рис. 43) на котором каждая градация серого отличается
от соседней на lg2. Очень часто градационный клин называют – серая
шкала.

Рис. 43 - Определение динамического диапазона изображения при
использовании градационного клина
Если установить его перед видеокамерой, то на мониторе можно подсчитать,
сколько градаций серого может передать видеотракт - объектив, камера,
монитор. Вот количество различимых градаций серого и будет
характеризовать динамический диапазон, но в терминах Ф-стоп, широко
применяемых в фотографии. Но это ориентировочное значение. Почему
ориентировочное? Прежде всего, потому, что динамический диапазон
определяется на линейной области динамической характеристики. Когда
сверху и снизу динамическая характеристика начинает ограничиваться, то
есть присутствует явная нелинейность, различать градации серого мы еще
можем, но это уже не соответствует истинной динамике сигнала на линейной
области (рис. 44).
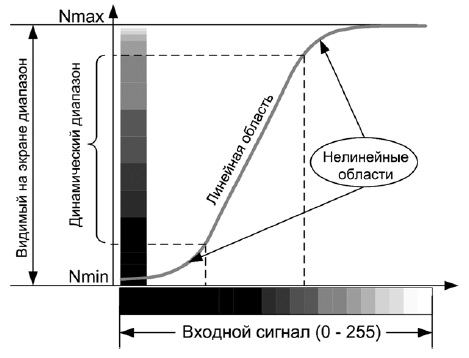
Рис. 44 - Определение реального динамического диапазона изображения
Для правильного определения динамического диапазона изображения по серой
шкале существуют специальные программные продукты, которые отслеживают
появление нелинейности в характеристики и выдают динамический диапазон
изображения только линейной области. Из графика на рис. 43 видно, что
реальный динамический диапазон всегда будет меньше своего предельного
значения - 48,16дБ.
И еще раз хочу обратить Ваше внимание на то, что мы говорим о
динамическом диапазоне и о градациях яркости изображения, которое
оператор видит на мониторе. Изменения освещенности на объекте и динамика
их изменения нами не рассматривалась и естественно на качество
видеотракта не влияет.
Далее
>>> |