|
2.10. Средства обнаружения и охранные комплексы на основе
радиолокационных станций
В настоящее время на рынке систем безопасности появились
радиолокационные системы (РЛС), предназначенные для круглосуточной,
всепогодной охраны периметров, территорий и акваторий. Работа РЛС
осуществляется посредством радиолокационного наблюдения территории,
обнаружения движущихся целей, измерения их координат и скорости,
распознавания класса цели и ее автосопровождения. Радиолокация
представляет собой метод обнаружения и определения местонахождения
объектов с помощью радиоволн. Волны излучаются радиолокационной
станцией, отражаются от объекта и возвращаются на станцию, которая
производит их анализ с целью точного определения местонахождения
объекта. Радиолокационные системы можно успешно применять на объектах со
значительной протяженностью. Так, РЛС осуществляют контроль периметра
объекта и внутренней территории, могут выступать в качестве
целеуказателей для поворотных видео и тепловизионных камер. В этом
случае РЛС решают задачу обнаружения, оценки скорости и класса
движущейся цели на расстоянии, существенно превышающем то, с которым
работают видеокамеры, а камеры и тепловизоры осуществляют детальное
видеонаблюдение обнаруженной цели.
Особенностью применения охранных РЛС является работа в местах
постоянного присутствия людей, поэтому уровень электромагнитного
излучения должен быть предельно низок, чтобы соответствовать действующим
в стране санитарным правилам и нормам. При этом показатели
качества обнаружения (в частности, дальность действия) должны
достигаться не увеличением мощности передатчика, а повышением
эффективности передачи информации, например, путем использования методов
расширения спектра, совершенствованием методов и алгоритмов обработки
данных.
Важной особенностью применения радиолокаторов во вневедомственной охране
является то, что информация о предполагаемом нарушителе и о попытке
проникновения на охраняемую территорию (объект) может поступать
заблаговременно на автоматизированное рабочее место оператора.
Задачами РЛС по охране периметра и территории объектов являются:
- обнаружение движущихся целей;
- измерение дальности, азимута и радиальной скорости целей;
- распознавание классов целей (человек, группа людей, автомобиль);
- идентификация и автосопровождение целей;
- автоматическое построение радиолокационной карты охраняемой
территории, неподвижных объектов, а также посторонних (вновь
появившихся), в том числе движущихся целей;
- привязка радиолокационной карты к топографической карте местности.
Далее рассмотрены основные тенденции развития радиолокационных систем в
целях повышения качества обнаружения проникновения на охраняемые
объекты.
2.10.1 Совершенствование алгоритмов обработки сигналов
Вследствие того, что на вход приемного устройства системы поступает
сумма полезного сигнала и помехи, вероятность правильного приема будет
определяться отношением полезного сигнала к помехе. Для повышения
вероятности правильного приема сигнала должна быть произведена
предварительная обработка принятого сигнала, обеспечивающая увеличение
отношения сигнал/помеха. Таким образом, средства предварительной
обработки при приеме должны содержать два основных элемента (рисунок
89): фильтр Ф, обеспечивающий улучшение отношения сигнал/помеха, и
решающее устройство РУ, выполняющее главные функции приема (обнаружения,
различения и восстановления сигналов).

Рисунок 89 - Структура оптимального приемного устройства
Алгоритмы обработки сигналов в радиолокаторе с непрерывным и
квазинепрерывным зондирующими сигналами (ЗС), предназначенными для
обнаружения человека или малоразмерного объекта, как правило, строятся
по следующим принципам, обеспечивающим улучшение соотношения
сигнал/помеха:
• метод накопления;
• частотная фильтрация;
• корреляционный метод;
• согласованная фильтрация;
• нелинейная фильтрация.
Все эти методы основаны на использовании различий свойств полезного
сигнала и помехи.
Для построения оптимальной обработки принятого сигнала в РЛС необходимо
снизить влияние помеховых факторов на работу радиолокатора. К помеховым
факторам относятся:
Помехи радиолокационному наблюдению
При радиолокационном наблюдении на практике неизбежно встречаются
различные помехи, которые нередко значительно сокращают дальность
обнаружения объектов и затрудняют чтение (расшифровку) изображения. Для
эффективного использования радиолокатора необходимо знать характер
помех, условия возникновения и возможности уменьшения их влияния на
радиолокационное наблюдение.
Частицы воды тумана рассеивают и поглощают часть электромагнитной
энергии, излучаемой радиолокатором, что приводит к уменьшению дальности
обнаружения объектов. Чем больший путь должен пройти сигнал через туман,
тем значительнее будет его ослабление, а значит и сокращение дальности
радиолокационного обнаружения.
Дальность визуальной видимости находится в определенном соотношении с
количеством воды в тумане. Следовательно, вызываемое туманом сокращение
дальности обнаружения различных плавсредств может быть поставлено в
зависимость от визуальной видимости. При визуальной видимости более 100
м сокращение дальности радиолокационного обнаружения незначительно, но
при видимости менее 100 м, т. е. при плотных густых туманах, дальность
радиолокационного обнаружения значительно сокращается. Имеются сообщения
о сокращении дальности обнаружения на 40-50% при очень густых туманах.
Песчаные бури также уменьшают дальность радиолокационного обнаружения.
Причем степень сокращения дальности, как и при тумане, зависит от
содержания в воздухе твердых частиц. Дальность обнаружения при песчаных
бурях и дымке несколько меньше, чем при тумане для одной и той же
дальности визуальной видимости.
Атмосферные осадки
Количество воды, содержащейся в единице объема, зависит от интенсивности
осадков, а поэтому и дальность радиолокационного обнаружения зависит от
количества осадков.
При малом количестве осадков отраженная ими энергия недостаточна, чтобы
на экране появились сигналы, способные «забить» сигнал от объекта.
Вместе с тем при увеличении количества осадков наступает момент, когда
отраженная от капель дождя энергия становится достаточной, чтобы вызвать
свечение экрана радиолокатора, способное «забить» отметку сигнала от
объекта. Этот эффект сильнее сокращает дальность обнаружения, нежели
ослабление сигналов, в этих случаях максимальная дальность обнаружения
определяется расстоянием, на котором интенсивность сигнала от объекта
становится равной интенсивности сигналов от осадков.
Град и снег также сокращают дальность радиолокационного обнаружения, но
главным фактором, влияющим на дальность обнаружения, является
интенсивность осадков.
Влияние волнения
При спокойном море отражение радиолокационного луча от поверхности воды
близко к зеркальному и направлено в сторону от антенны. Если же на
поверхности моря имеются волны, то часть отраженной от них
электромагнитной энергии воспринимается радиолокатором, на экране
появляются сигналы от волн.
Мощность сигналов зависит от степени волнения и быстро уменьшается с
увеличением расстояния. При небольшом волнении на экране РЛС наблюдается
множество слабых сигналов, которые меняют свое место и яркость с каждым
оборотом антенны. При значительном волнении сигналы от волн сгущены и
засвечивают полностью большую часть площади в центре экрана. Современные
судовые радиолокационные станции при высоте антенны до 20 м воспринимают
сигналы от волн в радиусе до 4 миль.
Засветка центра экрана РЛС сигналами от волн в значительной степени
затрудняет радиолокационное наблюдение. Если же сигналы от объекта по
силе не превосходят сигналы от волн, то обнаружить их на фоне помех
невозможно.
В некоторых случаях сигналы от судов могут быть выделены среди помех от
волнения. Для этого используют схему временной автоматической
регулировки усиления (ВАРУ).
Когда волнение отсутствует, регулятор ВАРУ должен быть выведенным, так
как нет необходимости уменьшать чувствительность приемника на малых
расстояниях. При волнении, помехи от которого желательно уменьшить,
необходимо правильно отрегулировать с помощью ВАРУ величину начального
усиления. Если начальное усиление будет уменьшено незначительно, то
отражение от волн по-прежнему будет давать яркие сигналы, способные
забить отметки судов. Если же начальное усиление будет уменьшено очень
сильно, то сигналы не только от волн, но и от других судов будут не
различимы.
Влияние работы других радиолокаторов
Иногда на экране радиолокатора появляются сигналы в виде точек,
пунктирных линий или сплошных линий. Положение таких сигналов на экране
и их взаимное расположение может быть разнообразным, но наиболее часто
встречаются сигналы в виде спиральных пунктирных линий.
В качестве примера влияния помех на работу РЛС приведен фрагмент экрана
кругового обзора радиолокатора до и после межпериодной обработки. Видно,
что цели, замаскированные метеообразованиями, выделяются, а помехи от
метеобразований, гор и местных предметов подавляются.
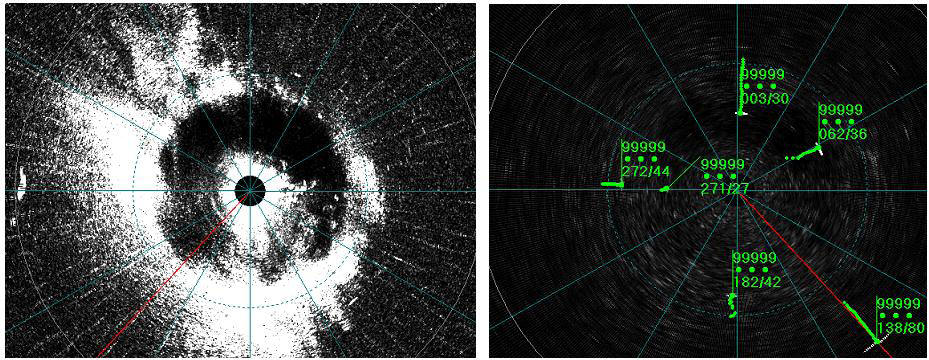 |
| а) без подавления помех |
б) при включении СДЦ |
Рисунок 90 - Экран монитора радиолокатора
2.10.2 Выбор зондирующего сигнала радиолокационной системы
Увеличение дальности действия РЛС при ограниченной пиковой мощности
передатчика делает необходимым применение сложных сигналов. Зондирующий
сигнал для этих РЛС выбирают, исходя из требования обеспечения
необходимой разрешающей способности и помехоустойчивости. При этом
диаграмму направленности (ДН) стараются сделать «карандашного» типа в
соответствующей плоскости с минимальным уровнем боковых лепестков. Для
этого применяют различные сложные виды модуляции. Наиболее
распространенными из них являются частотно-модулированные сигналы,
многочастотные сигналы, фазоманипулированные сигналы, сигналы с кодовой
фазовой модуляцией, дискретные частотные сигналы или сигналы с кодовой
частотной модуляцией, составные сигналы с кодовой частотной модуляцией и
ряд сигналов, являющихся комбинацией нескольких видов модуляции.
Чем уже главный лепесток и чем ниже уровень излучения боковых лепестков,
тем выше разрешение и помехоустойчивость РЛС.
Когерентный метод радиолокации основан на выделении и анализе
разности фаз излученного и отраженного сигналов, которая возникает из-за
эффекта Доплера при отражении сигнала от движущегося объекта. Передающее
устройство может работать как непрерывно, так и в импульсном режиме.
Одно из преимуществ данного метода заключается в том, что наблюдение
производится только за движущимися объектами, что позволяет исключить
помехи от неподвижных предметов, расположенных между приемником и целью.
В последнее время получило распространение применение
сверхширокополосных сигналов, имеющих η в пределах: 0,25 < η < 1, где η
определяется по формуле:
η = (fверх - fниж)/(fверх + fниж)
Напомним, что называть сигналы сверхширокополосными (СШП) принято по
определению, введенному в 1990 г. Комиссией Управления перспективных
военных НИОКР Министерства обороны США (DARPA).
Хотя это определение не охватывает всего многообразия СШП систем и
сигналов, оно в настоящее время используется большинством разработчиков.
Проблема перехода к СШП сигналам особенно актуальна для радиолокации.
Дело в том, что обычные радары с полосой частот, не превышающей 10% от
несущей частоты, позволяют только обнаруживать цель и выдавать ее
координаты (с относительно невысокой точностью), но не позволяют
получить образ цели или ее изображение. Поэтому сегодня на практике для
увеличения информации о наблюдаемом объекте принимаются дополнительные
меры.
Повышение информативности радара при использовании СШП сигналов
происходит вследствие уменьшения импульсного объема по дальности.
Импульсный объем по дальности – это объем пространства, в котором
находятся одна или несколько целей за время облучения их одним
импульсом. Эти цели дают несколько похожих друг на друга источников
вторичного излучения, которые невозможно идентифицировать обычными
методами, а также, не уменьшая длительности импульсов. Так, при
уменьшении длительности излучаемого импульса с 1 мкс до 1 нс глубина
импульсного объема радара уменьшается с 300 м до 30 см.
В настоящее время широко применяются устройства на основе цифровых
методов обработки сигналов с использованием микропроцессорной элементной
базы.

Рисунок 91 - Радарный процессор «RP-3.2»
Многофункциональный радарный процессор RP-3.2 (рисунок 91) предназначен
для обработки радиолокационной информации и преобразования ее в цифровую
форму в виде, удобном для различных технических приложений.
Радарный процессор обладает следующими особенностями:
- происходит аналогово-цифровое преобразование радиолокационного
видеосигнала от одного из двух подключенных радаров;
- имеются режимы ручной и автоматической (адаптивной) установки порога
обнаружения видеосигнала;
- имеется регулировка длительности обнаруживаемого видеосигнала;
- имеется режим защиты от протяженных (низкочастотных) помех (режим
«Дождь») с возможностью регулировки уровня;
- имеется режим подавления асинхронных помех от других РЛС;
- имеется режим подавления шумовых помех;
- имеется аппаратная индикация отсутствия (пропадания) сигналов от
выбранного радара;
- осуществляется оценка режима работы приемо-передатчика РЛС путем
измерения частоты следования импульсов SYNCHRO;
- обеспечивается формирование радиолокационного изображения на шкалах
дальности от 0,125 мили до 32 миль.
- формирование радиолокационного изображения осуществляется с учетом
текущего курса судна, что исключает искажения изображения вследствие
«рысканья» судна по курсу и неравномерного вращения антенны РЛС
(азимутальная стабилизация).
Практическая реализация радиолокационных систем со
сверхширокополосными сигналами
РЛС обнаруживает цель при пересечении ею короткого участка (строба)
дальности в широкой угловой зоне обзора. За счет широкой диаграммы
направленности антенн этот строб перекрывает значительную контролируемую
площадь, создавая узкий пространственный барьер в виде части сферы с
радиусом, ограниченным дальностью действия РЛС (рисунок 92).
Параметрами строба являются дальность RS и ширина, где tи
- длительность зондирующего импульса, с - скорость света. В РЛС ширина
строба дальности может изменяться от нескольких десятков сантиметров до
нескольких метров.
Рисунок 92 - Принцип работы РЛС
В каждый момент времени РЛС может контролировать один или несколько
стробов на разных дальностях RS. В данной схеме РЛС предусмотрен
контроль одного строба дальности. При отсутствии в стробе движущихся
объектов на входе приемника присутствует сигнал, определяемый только
отражением от подстилающей поверхности и неподвижных объектов. Этот
сигнал не попадает в полосу частот, соответствующую доплеровским
скоростям движения цели, и не проходит в систему обработки. При
появлении в стробе объектов, движущихся в заданном диапазоне скоростей,
на выходе приемника возникает сигнал, который используется для принятия
решения о наличии цели.
После принятия решения о наличии цели, в рамках определения направления
ее движения производится сопровождение путем смещения строба РЛС по
дальности.
Достоинством описываемого метода обзора является одновременный контроль
большой площади пространства, позволяющий простыми аппаратурными
решениями достичь необходимого результата. Для определения угловых
координат цели возможно совместное использование двух РЛС, позволяющее
разрешать объекты по углу в одной плоскости. При совместной работе трех
РЛС возможно определение угловых координат в горизонтальной и
вертикальной плоскостях.
В научно-исследовательском Центре сверхширокополосных технологий
Московского авиационного института разрабатываются СШП радары для
обнаружения двигающихся и неподвижных людей за оптически непрозрачными
преградами (стена, дым, обломки строительных конструкций) или в
растительности (кустарник, лес). Малая длительность сигнала обеспечивает
СШП радарам высокую точность определения местоположения человека за
преградой и устойчивую работу в условиях многократных переотражений от
окружающих предметов.
При этом возможно наблюдение как движущегося человека за стеной, так и
находящегося в неподвижном положении (фиксируются движения грудной
клетки).
Рисунок 93 - макет СШП радара
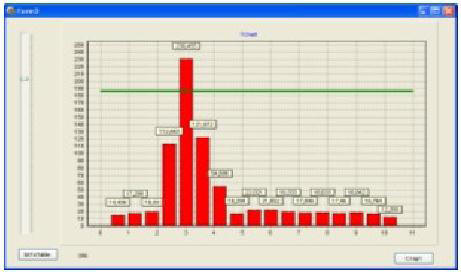
Рисунок 94 - Сигналы радара по дистанции
С учетом этих особенностей разработан макет СШП радара (рисунок 93). Радар обеспечивает обнаружение двигающегося и неподвижного человека на расстоянии до 10 метров за стеной. Дистанция за
стеной разделена на элементы разрешения
протяженностью 30 см. Погрешность измерений не
превышает 5%. Радар имеет два рабочих режима: обнаружение двигающегося человека с темпом 2 с и обнаружение неподвижного
человека (по его дыханию) с темпом 10 с.
Переход из одного режима в другой производится
вручную. Информация о дальности до обнаруженных объектов отображается на светодиодном табло на верхней панели радара
(рисунок 94). Для одновременного наблюдения за
всей дистанцией радар позволяет вывести на
экран дополнительного монитора сигналы из каждого элемента дальности. Элементы дальности, в которых сигнал превысил порог, высвечиваются на светодиодном табло. Чтобы устранить влияние
движения рук оператора на результаты
наблюдения, работа радара производится с
переносной легкой опоры. Корпус радара обеспечивает его защиту от пыли и влаги, выдерживает механические нагрузки в соответствии с
действующими нормами.
2.10.3 Использование частотного диапазона мм-волн. Преимущества радиолокационных станций (РЛС) миллиметровых волн (ММВ) перед РЛС дециметровых (ДМ) и сантиметровых (СМ) волн
Существующие радиолокационные станции РЛС ДМ и СМ диапазонов
волн наряду с известными преимуществами имеют ряд существенных
недостатков при обнаружении и опознавании объектов в охранной зоне:
• трудность опознавания ориентиров по радиолокационному
изображению, недостаточная точность определения координат объектов;
• сложность и трудность глазомерной оценки ситуации при
наблюдениях в сложившихся условиях с быстро изменяющимися
обстоятельствами во времени;
• отсутствие возможности классификации наблюдаемых объектов и
определение ситуации развития событий по радиолокационному
изображению;
• недостаточная информативность.
Одним из наиболее эффективных путей улучшения технических,
эксплуатационных и временных характеристик существующих РЛС и
средств автоматической радиолокационной прокладки (САРП) является
применение в качестве датчиков информации высокоинформативных с
повышенной точностью РЛС ММ диапазона волн.
Следует отметить ряд преимуществ РЛС ММ диапазона при
использовании их для охраны объектов.
Известно, что с учетом наличия подстилающей морской поверхности
диаграмма направленности антенны (ДНА) в вертикальной плоскости имеет
многолепестковую структуру. Обнаружение малых надводных объектов
(человека, пловца, знаков навигационного ограждения, лодок, катеров,
мелкобитого льда) осуществляется нижним лепестком ДНА.
Угол наклона нижнего лепестка ДНА РЛС ММ диапазона значительно
меньше, чем РЛС ДМ и СМ диапазона. Например, при установке антенны
РЛС этих диапазонов на высоте 10 м угол наклона лепестка в каждом из
диапазонов будет равняться β10 см = 2,5 мРад, β3,2 см = 0,8 мРад, β0,8
см = 0,2
мРад, то есть в ММ диапазоне он меньше в 12,5 раз и в 4 раза
соответственно. ДНА в вертикальной плоскости в ММ диапазоне больше
«прижимается» к подстилающей поверхности, следовательно, при
использовании такой РЛС малоразмерные цели обнаруживаются с большей
вероятностью и на большем расстоянии.
При одном и том же раскрыве антенны для РЛС с длиной волны λ1 =
10 см, λ2 = 3,2 см, λ3 = 0,8см коэффициент усиления G антенны в ММ
диапазоне значительно больше (в 155 раз по сравнению с ДМ диапазоном, в
11 раз - с СМ диапазоном).
При прочих равных условиях это позволяет создать больший
энергетический потенциал РЛС ММ диапазона, что, в свою очередь,
компенсирует потерю части энергии при распространении зондирующего
импульса при неблагоприятных метеоусловиях.
Расчет показывает, что потенциальная информативность ММ
диапазона соответственно на 3 и 2 порядка выше, чем ДМ и СМ диапазонах.
Важным преимуществом изображения РЛС ММ диапазона является
возможность быстрой глазомерной оценки ситуации с выделением наиболее
опасных объектов. Особенно это важно при обнаружении движущихся
объектов при их маскировке в отражении неподвижных объектов. Для
охранных целей важным преимуществом РЛС ММ диапазона является
повышенные вероятность и дальность обнаружения низкорасположенных
объектов с малой эффективной поверхностью рассеивания (ЭПР).
ЗАО «Морские комплексы и системы» разработали и серийно
выпускают охранные РЛС ММ диапазона. Охранные РЛС ММ диапазона
могут устанавливаться как стационарно на берегу для охраны особо важных
объектов со стороны акватории, так и на подвижных охраняемых объектах
(мобильных передвижных средствах). Функционально охранные системы
могут применяться самостоятельно или входить в состав более сложных
охранных систем, включая охрану от угроз со стороны воздушного
пространства и морских глубин.

Рисунок 95 - РЛС «Балтика-Б»
РЛС миллиметровых волн «Балтика-Б» (рисунок 95) предназначена для
использования на постах технического наблюдения как отдельное изделие, а
при комплектации устройствами сопряжения применяется как источник
радиолокационной информации (РЛИ) в автоматизированных системах
обработки, отображения и регистрации РЛИ. Основные преимущества РЛС
заключаются в использовании 8-мм диапазона, в применении цифровой
обработки информации. Предусмотрена возможность автоматизированного
съема информации. РЛС «Балтика-Б» обладает высоким разрешением по
координатам, что позволяет обеспечить лучшие точности измерения
координат, а также обеспечивает ее преимущество по уровню ложных тревог
при работе в условиях взволнованной морской поверхности. Для решения
задач охраны в качестве датчика радиолокационной информации используется
импульсная РЛС ММ диапазона с горячим резервированием.


Рисунок 96 - Радиолокатор 112L1А «Барсук-А»
Малогабаритный радиолокатор 112L1А «Барсук-А» (рисунок 96) с
частотой 36 ГГц производства ОАО «Укрспецтехника» устанавливается на
поворотном устройстве (стационарный вариант). Обеспечивает охрану
заданной зоны ответственности в любое время суток и года в условиях
отсутствия оптической видимости, реализует функции автоматического
обнаружения людей, наземных и надводных транспортных средств.
К плюсам системы можно отнести осуществление ввода карты местности, а
также формирование контрольных рубежей и запретных зон. Радиолокатор
автоматически выдает сигнал тревоги при нарушении контрольных рубежей.
Информация передается по интерфейсу RS-422 (485) на расстояние до 1 км.
В РЛС 112L1-А "Барсук-А" обнаружение и идентификация цели происходят в
автоматическом режиме, при этом на мониторе отображаются отметки целей,
данные о которых автоматически заносятся в формуляр с указанием их
номера, дальности, азимута и признака (человек - транспорт), с привязкой
к карте местности.
Предусмотрена возможность выбора зон бланкирования и зон повышенного
внимания. Дальность обнаружения целей, движущихся с радиальной скоростью
2-50 км/час:
- одиночный человек - до 1000 м;
- автотранспорт, плавсредство - до 1600 м;
- пловец - до 200 м.
2.10.4 Повышение помехозащищенности
Под термином «помехоустойчивость» понимается устойчивость РЛС к помехам,
обусловленным отражениями зондирующего сигнала от объектов, не
являющихся целями и расположенных вне анализируемого строба (частотного,
временного).
Помехозащищенностью называется способность радиолокационного устройства
сохранять свои основные тактические показатели при воздействии помех
того или иного вида. Для оценки помехозащищенности не выработано
числовых показателей. Можно только сказать, что из двух РЛС та будет
обладать более высокой помехозащищенностью, у которой при прочих равных
условиях воздействие помехи вызовет меньшее ухудшение тактических данных
(дальности действия, точности и разрешающей способности). К тактическим
данным относят иногда и те условия, в которых должна работать станция
(характеристики целей, условия погоды, место размещения и т.д.).
Переход от селекции движущихся целей (СДЦ) в соответствии с правилом
Доплера к селекции по дальности позволяет обнаруживать нарушителя с
малой радиальной скоростью. Влияние подстилающей поверхности (колебания
травы, кустов, отражения от местных предметов) сведено к минимуму.
Береговая РЛС (БРЛС) «Атлантика-КХ» (рисунок 97) комплектуется
двумя приемо-передатчиками миллиметрового (Ка) и сантиметрового (Х)
диапазонов совмещенной антенны, установленной на общем приводе. Работает
в Ка и Х диапазоне раздельно или одновременно по желанию оператора. При
одновременной работе осуществляется комплексирование обоих диапазонов
путем совместной обработки их сигналов, что заметно улучшает
помехозащищенность и дальность обнаружения целей.

Рисунок 97 - БРЛС «Атлантика-КХ»
Станция характеризуется сверхвысокой разрешающей способностью по азимуту
0,22 град, по дальности 8-10 м и точностью измерения координат,
увеличенной дальностью обнаружения малых надводных объектов.
Максимальная дальность обнаружения надводных целей:
- большое судно в Ка диапазоне - 21,0 км, в Х диапазоне - 54,7 км;
- резиновая лодка, буй в Ка диапазоне- 6,7 км, в Х диапазоне - 16,4 км.

Рисунок 98 - Радиолокатор «ЛИС»
Радиолокатор 111L1 «ЛИС» (рисунок 98) производства ОАО
«Укрспецтехника» предназначен для обнаружения движущихся людей и техники
(в вариантах исполнения - медленных низколетящих целей, а также
передвигающихся по водной поверхности объектов) с целью обеспечения
охраны территории или разведки. Обеспечивает автоматическое обнаружение
объектов в любое время суток и календарного года, в дожде, пыли и
тумане, при отсутствии оптической видимости с наглядным автоматическим
отображением целей на жидкокристаллическом индикаторе (дисплее) и
выдачей формуляра целей (дальность, пеленг) на том же индикаторе. В
обработке применены непараметрические алгоритмы обнаружения, позволяющие
избавиться от отметок ложных целей вне зависимости от существующей
помеховой обстановки. Присутствует режим распознавания целей,
позволяющий автоматически определить скорость любой из обнаруженных
целей и прослушать оператором характерную звуковую окраску спектра цели
(человек, группа, автотранспорт, вертолет и т.д.). Вращение антенной
системы, в том числе ее горизонтирование, осуществляется
пьезоэлектрическими безредукторными реверсивными самотормозящимися
электродвигателями.
2.10.5 Интеграция РЛС с видеонаблюдением и тепловизором
Несомненный плюс радиолокаторов - это возможность совместной работы с
тепловизором и системой видеонаблюдения. В этом случае РЛС выступает в
качестве предварительного целеуказателя для поворотных камер
видеонаблюдения. РЛС в связке с видеонаблюдением отвечает за
предварительное обнаружение цели на подступах к ответственной камере.
Фактически радар отвечает за измерение скорости движения цели,
определяет ее класс и начинает вести слежение, фокусируя на нее камеры
видеонаблюдения и тепловизор.

Рисунок 99 - РЛС MRS-1000
Цифровая РЛС «MRS-1000» (рисунок 99) производства НПФ «Микран»
— это широкополосный радар, выполненный на твердотельном
приемо-передающем устройстве. Заявленная производителем дальность
обнаружения человека - до 1000 м, автомобиля - до 2000 м. Разрешение по
дальности составляет 1,5 м. РЛС имеет низкий пиковый уровень мощности
излучения и длительный срок необслуживаемой эксплуатации (до 20 000
часов). Кроме того, используемая малая мощность излучения, сравнимая с
мощностью излучения сотового телефона, создает меньше помех для других
радиотехнических систем, приносит меньше вреда для здоровья человека.
Администратор системы посредством встроенной в программное обеспечение
специальной функции может формировать охранные зоны и зоны отчуждения с
различными вариантами и уровнями оценки опасностей. В состав системы
технической защиты объектов могут включаться неподвижные и поворотные
видеокамеры и тепловизоры. Информация о целевой обстановке отображается
на автоматизированном рабочем месте оператора. В перспективе установка
совместно с телевизионной и тепловизионной системами на
подъемно-мачтовом устройстве «МИК-АМУ» (производства НПФ «Микран»
совместно с предприятием «Юрмашзавод») позволит реализовать
интегрированную систему, обладающую высокой вероятностью обнаружения
малоразмерных целей на сложных рельефах. Мачтовое устройство с высотой
подъема 4-32 м позволит работать из-за укрытий, в условиях
сильнопересеченной и лесистой местности.
В паре с тепловизором радиолокационная система Orwell-R (рисунок
100) имеет следующие возможности по обнаружению целей:
- распознавание выходящего из воды человека - на расстоянии до 200 м;
- распознавание человека в светлое время суток - на расстоянии до 390 м;
- обнаружение плавсредства в светлое время суток - на расстоянии до 280
м;
- обнаружение движущегося автомобиля в темное время суток - на
расстоянии до 400 м.

Рисунок 100 - РЛС Orwell-R
На мониторе оператора, который управляет комплексной системой
безопасности, появляется информация о текущей обстановке в зоне
наблюдения. Информация отображается в виде координатной сетки со
схематическим отображением на ней стационарных объектов, а также
местоположением всех обнаруженных целей.
По каждой из целей отображается ее класс, координаты и скорость
передвижения в данный момент. Кроме того, можно выполнить привязку
информации с РЛС к топографической карте местности.
Технические характеристики РЛС ORWELL-R приведены в таблице 5.
Таблица 5
| Наименование параметра |
Значение |
|
Напряжение питания, В |
~220 / 50 Гц |
|
Диапазон напряжения питания, В |
от 187 до 242 |
|
Габаритные размеры, мм |
505×207×491 |
|
Габаритные размеры с присоединенной
антенной (с учетом вращения антенны), мм |
660×660×472 |
|
Габаритные размеры с установленным
защитным куполом (диаметр × высота), мм |
821×763,5 |
|
Масса изделия (без учета антенны и
защитного купола), кг |
Не более 18 |
|
Диапазон рабочих температур, °С |
От минус 50 до +50 |
|
Средняя излучаемая мощность, мВт |
75 |
|
Ширина спектра сигнала, МГц |
84 |
|
Рабочая полоса, МГц |
16 600–17 300 |
|
Интерфейс передачи данных 100 Мбит |
Ethernet |
|
Интерфейс управления |
RS-485 |
|
Скорость связи по интерфейсу RS-485,
бит/с |
9600, полудуплекс |
|
Потребляемая мощность, Вт |
Не более 400 |
Типовые пользовательские характеристики при работе в составе
интегрированной системы безопасности «Orwell-2K» приведены в таблице 6.
Таблица 6
| Наименование параметра |
Значение |
| 1 |
2 |
|
Режимы излучения (по типу модуляции
зондирующего сигнала) |
Короткоимпульсный, без внутриимпульсной
модуляции (КИ-режим).
Режим с внутриимпульсной линейной частотной модуляцией (ЛЧМ-режим). |
| Параметры автоматического обнаружения |
|
Типы целей |
Наземные цели: человек (идущий,
бегущий); транспортные средства.
Водные цели (суда, включая сверхмалые). |
|
Максимальная дальность обнаружения, м |
Человек (ЭПР свыше 0,5 м², радиальная
скорость свыше 0,5 м/с:
500 - (КИ-режим) или
950 - (ЛЧМ-режим).
Транспортное средство, надводные цели (ЭПР свыше 5 м²) - 1 100. |
|
Минимальная дальность обнаружения, м |
50 - (КИ-режим) или 150 - (ЛЧМ-режим) |
|
Максимальная радиальная скорость цели,
при которой происходит обнаружение |
30 м/с для сверхмалых целей (резиновая
лодка). Для более ярких целей - без ограничений скорости |
| Ошибки определения параметров целей |
|
Ошибка измерения наклонной дальности
цели, м, не более |
6 - (КИ-режим) или
3 - (ЛЧМ-режим) |
|
Ошибка измерения азимута цели, град., не
более |
1 |
|
Ошибка измерения радиальной скорости
цели, м/с, не более |
0,5 |
|
Возможность оценки полного вектора
скорости |
Да - путем экстраполяции траектории |
| Вторичная обработка |
|
Распознавание класса целей |
Да - человек, группа людей, транспортное
средство, судно, поезд, область интенсивного движения |
|
Построение траектории, автосопровождение |
Да |
|
Зоны тревоги произвольной формы с
выдачей визуального и звукового сигналов тревоги |
Да |
|
Управление поворотными телекамерами |
Ручное, полуавтоматическое (указанием
точки на карте), автоматическое, по факту обнаружения целей |
|
Архив |
Да, синхронный архив радиолокационной
информации и всех связанных источников видео |
| Параметры зоны обзора |
|
Аппаратный диапазон дальностей |
50–850 м в КИ-режиме или
150–950 м в ЛЧМ-режиме;
возможно изменение (сдвиг) диапазона до 400–1 200 м |
|
Способ азимутального обзора |
Механическое сканирование (вращение) |
|
Азимутальный размер зоны обзора |
Любой |
|
Угловая скорость сканирования
(вращения), град/с |
20–100, оптимальная скорость для
обнаружения человека - 40. |
2.10.6 Повышение мобильности - радио сканер траекторий (ЗАО «Фирма
ЮМИРС»)
РАСТР(с) (радио сканер траекторий) – радиоинформационное
устройство, классифицируемое как тип активной когерентной РЛС, имеющей
разрешение по дальности и радиальной скорости и не имеющей углового
разрешения, при этом угловые координаты обнаруженных объектов
вычисляются с использованием моноимпульсных методов.

Рисунок 101 - Радио сканер траекторий
РАСТР(с) предназначен для обнаружения траекторий движущихся объектов
(человек, транспортное средство и т.д.) на открытой земной поверхности,
а также для обнаружения траекторий движущихся объектов (водный мотоцикл,
лодка, судно и т.д) на водной поверхности в пределах своего рабочего
сектора.
РАСТР(с) обеспечивает следующую выходную траекторную информацию по
каждому из обнаруженных объектов: дальность, азимут, вектор скорости,
площадь отражательной поверхности и тип объекта.
РАСТР(с) – это твердотельное электронное устройство без движущихся
механических частей в своем составе, с полностью цифровой реализацией
алгоритмов синтеза и обработки сигналов на основе специализированного
микропроцессора.
Области применения:
- Контроль больших по площади открытых территорий, в том числе
государственных границ, морских побережий, аэродромов, акваторий речных,
морских портов и водохранилищ и т.д.;
- Контроль протяженных коммуникаций, в том числе железных дорог,
трубопроводов, ЛЭП и т.д.
Основные преимущества и особенности:
- Отсутствие необходимости лицензирования частотного диапазона;
- Низкая мощность электромагнитного излучения;
- Независимость работы от погодных условий, задымленности и времени
суток;
- Легкость установки и низкие эксплуатационные затраты;
- Высокая надежность с гарантированной стабильностью параметров в
течение всего периода эксплуатации;
- Низкое энергопотребление и безопасный уровень питающего напряжения;
- Высокий темп обновления траекторной информации с быстрым обнаружением
новых траекторий;
- Низкая вероятность ложных тревог вследствие применения адаптивных
алгоритмов фильтрации помех от растительности и волн;
- Распознавание типа объекта;
- Возможность развертывания сетевой структуры с взаимным перекрытием
рабочих секторов нескольких устройств;
- Открытый протокол для интеграции во внешние информационные сети, в том
числе для интеграции с оптическими и тепловизионными средствами
наблюдения. Технические характеристики приведены в таблице 7.
Таблица 7
| Наименование параметра |
Значение |
| 1 |
2 |
|
Полоса рабочих частот, МГц |
2 300…2 450 |
|
Средняя мощность излучения, мВт, не
более |
100 |
|
Протяженность рабочего сектора
(инструментальная дальность), не менее, м |
3 000 |
|
Минимальная дальность обнаружения, не
более, м |
20 |
|
Ширина рабочего сектора, не уже, град |
90 |
|
Ширина луча антенны по углу места, не
уже, град |
23 |
|
Максимальная дальность обнаружения:
- человек, ЭПР 0,5 кв.м, не менее, м
- транспортное средство, ЭПР 3 кв.м, не менее, м* |
2 000
3 000 |
|
Разрешение по дальности, не более, м |
6 |
|
Разрешение по радиальной скорости, не
более, км/ч |
0,6 |
|
Диапазон радиальных скоростей
обнаруживаемых объектов, не уже, км/ч |
0,72…150 |
|
Точность определения дальности объекта,
не хуже, м |
1 |
|
Точность определения азимута объекта, не
хуже, град |
0,5 |
|
Максимальное количество одновременно
вычисляемых траекторий обнаруженных объектов, не менее |
100 |
|
Частота обновления выходной
(траекторной) информации, не менее, Гц |
12 |
|
Время обнаружения траектории объекта, не
более, с** |
3 |
|
Типы распознаваемых объектов |
|
|
- земная поверхность |
животное
человек
группа людей
транспортное средство |
|
- водная поверхность |
скутер
лодка
судно |
|
Внешние интерфейсы |
RS-485, Ethernet |
|
Диапазон рабочих температур, град С |
-40 … +60 |
|
Габаритные размеры, не более, мм |
360x360x150 |
|
Масса, не более, кг |
3 |
|
Номинал питающего напряжения, В |
+10 … 36 |
|
Потребляемая мощность, не более, Вт |
10 |
|
Среднее время наработки на отказ, не
менее, ч*** |
60 000 |
* - при высоте установки над поверхностью не менее 15 м;
** - при наличии условий радиовидимости в данной точке появления
объекта;
*** - расчетная величина.
Фрагмент испытаний радиолокационного устройства обнаружения объектов
приведен на рисунке 102.

Рисунок 102 - Полевые испытания РАСТР(с)
При проектировании РЛС сейчас особое внимание уделяется решению задачи
оптимизации расходования ресурсов. Обнаружить и распознать объект
необходимо не за счет количественного наращивания энергетики, а, прежде
всего, за счет создания эффективных алгоритмов обработки информации.
Перспективным решением является применение радиолокационных систем
высокого разрешения (широкополосных) ШРЛС. Они дополняют существующие,
однако при этом имеют характеристики, достижимые только при
использовании нескольких устройств одновременно. ШРЛС позволяют получать
высокое качество радиолокационных изображений и при этом иметь
возможность их интеллектуальной обработки. Радиолокация становится
радиолокацией предельных характеристик. Все шире используются
сверхширокополосные сигналы, сверхдлинные и сверхкороткие импульсы.
Диапазон используемых длин волн — от сверхдлинных до миллиметровых,
дальность действия — от сантиметров и метров до десятков тысяч и более
километров. Точности и разрешения приближаются к оптическим. Получат
дальнейшее развитие РЛС, адаптирующиеся к помеховой и целевой
обстановке. Акцент делается на объединение РЛС различного типа в единую
систему обнаружения. Перспективные системы обнаружения и сопровождения
различного назначения должны работать с современными средствами
навигации, в частности, с глобальной навигационной спутниковой системой
ГЛОНАСС, средствами связи и информационного обеспечения.
Использование РЛС для охраны периметра и территории объектов выгодно с
экономической точки зрения, т.к. на российском рынке представлены
системы, которые обладают низкой удельной стоимостью охраны квадратного
километра.
2.10.7 Мобильные патрульные комплексы
Мобильный патрульный комплекс (МПК) контроля за наземной (надводной)
обстановкой, позволяющий вести обнаружение и распознавание неподвижных и
движущихся объектов на дальностях до 15 км (рисунок 103).

Рисунок 103 - Мобильный патрульный комплекс
В комплекс входят радиолокационный и оптико-электронный модули,
связанные единым алгоритмом управления, обработки, документирования,
отображения и передачи информации. Всесуточность и всепогодность
комплекса обеспечиваются сочетанием в нем радиоэлектронных датчиков,
работающих в различных диапазонах длин волн: сантиметровом, инфракрасном
и видимом диапазонах спектра.
Комплекс имеет в своем составе:
1 систему навигации: магнитный электронный комплекс, спутниковый
навигационный GPS-приемник,
2 систему связи: УКВ-радиостанция, телефон спутниковой связи,
3 радиолокационный модуль: когерентная радиолокационная станция,
работающая в диапазоне длин волн 3 см,
4 оптико-электронный модуль: тепловизор, видеокамера, лазерный
дальномер,
5 систему электропитания,
6 комплект аккумуляторов, электростанцию.
Основные ТТХ комплекса:
- Базовое шасси комплекса — автомобиль повышенной проходимости серии
«УАЗ-Патриот».
- Общий вес аппаратуры комплекса не превышает 350 кг.
- Потребляемая мощность аппаратуры — около 900 Вт.
- Аппаратура комплекса по стойкости к внешним воздействиям соответствует
требованиям группы 1.3 УХЛ ГОСТ РВ 20.39.304-98.
- Время непрерывной работы от комплекта аккумуляторов — не менее 8
часов.
- Ограничение по времени непрерывной работы при работе от сети
отсутствует.
- Время развертывания - не более 10 минут.
Условия эксплуатации
Для аппаратуры, размещаемой снаружи:
- повышенная температура, рабочая и предельная - +45°С;
- пониженная температура, рабочая и предельная - минус 40°С;
Для аппаратуры, размещаемой внутри:
- повышенная температура, рабочая и предельная - +45°С;
- пониженная температура, рабочая - минус 10°С;
- пониженная температура, предельная - минус 40°С.
Характеристики модулей
А) Радиолокационный модуль (РЛМ) // Радиолокационная станция обнаружения
наземных движущихся целей «ОКАПИ-С»// обеспечивают:
- Контроль наземной обстановки.
- Автоматический поиск, обнаружение, определение координат и параметров
движения (курс, скорость) наземных движущихся объектов.
- Автоматическое сопровождение.
- Документирование радиолокационной информации.
- Выдачу информации в автоматизированные системы сбора и обработки
информации.
- Отображение радиолокационной информации на фоне цифровых карт
местности формата SXF.
- Возможность создания 5 зон повышенной ответственности с выдачей
звукового сигнала тревоги при пересечении целью их границ.
Внешний вид индикатора и РЛС обнаружения наземных целей приведены на
рисунке 104.
 
Рисунок 104 - Вид индикатора и РЛС «Окапи-С»
|
Характеристики РЛС |
Значение |
|
Средняя мощность (Вт) |
0,4 |
|
Дальность обнаружения целей с
вероятностью не ниже 0,9: |
|
|
Человек (км) |
5 |
|
Автомобиль, катер, лодка (км) |
8 |
|
Большегрузный автомобиль, БТР (км) |
12 |
|
Приборная дальность, км |
15 |
|
Погрешность измерения координат и
параметров движения целей: |
|
|
По азимуту (град) |
не хуже 1,0 |
|
По дальности (на всех диапазонах
дальности) (м) |
не хуже 5 |
|
По скорости (км/ч) |
не хуже 0,2 |
|
Скорость обзора пространства (град/сек.) |
до 10 |
|
|
|
|
Б) Оптико-электронный модуль (ОЭМ): |
|
|
Тепловизор Proton XLR2 |
|
|
Поля зрения (град) |
|
|
широкое |
18,3х14,7 |
|
узкое |
3,7х2,9 |
|
Распознавание (км) |
|
|
человек |
3 |
|
легковой автомобиль |
4,5 |
|
Диапазон длин волн (мкм) |
3,6...4,9 |
|
Видеокамера |
|
|
Дальность распознавания в условиях
нормальной атмосферы, км |
|
|
человек |
3 |
|
автомобиль |
8 |
|
Максимальное увеличение (крат) |
25 |
|
Минимальная рабочая освещенность (лк) |
2,5 |
|
Количество пикселей |
800000 |
|
Диапазон длин волн (мкм) |
0,4...0,8 |
Разработан и изготовлен опытный образец мобильного патрульного комплекса
на базе шасси автомобиля Defender производства фирмы Land Rover (рисунки
105, 106).

Рисунок 105 - МПК на базе шасси автомобиля Defender
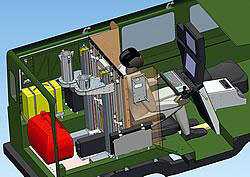
Рисунок 106 - Схема внутреннего оснащения МПК
Выводы
1 Для решения вопроса об оснащении подразделений вневедомственной охраны
РЛС необходим предметный анализ возможности организации данного вида
охраны с определением конкретных категорий объектов (их количества),
которые целесообразно оборудовать соответствующими техническими
средствами.
2 РЛС наблюдения за периметрами и территориями (акваториями) объектов
обеспечивают быстрое и точное обнаружение движущихся целей (живой силы и
техники) в зоне обзора, приблизительное определение количества целей и
скорости их перемещения. Однако радиолокаторы имеют ряд недостатков:
- довольно трудно по некоторым характерным признакам распознать тип
целей, например, отличить ползущего человека от идущего, группу
нарушителей от одиночного и т.п.;
- зона обзора станции ограничивается дальностью прямой видимости,
поэтому основными факторами, определяющими выбор местоположения антенны
РЛС, являются топографические свойства местности;
- поскольку РЛС является радиотехническим средством активного типа, то
есть излучает электромагнитную энергию, ее легко обнаружить на
расстояниях, обычно превышающих дальность ее действия. Этот недостаток
может быть компенсирован специальной конструкцией антенны,
обеспечивающей низкий уровень ее боковых лепестков;
- и, наконец, еще один недостаток РЛС, как и любой другой электронной
аппаратуры, состоит в их подверженности воздействию средств РЭБ
противника.
3 Одним из направлений конструирования РЛС охраны является создание
станций с меньшей длиной рабочей волны, что позволяет снизить вес,
повысить транспортабельность и мобильность станций. При уменьшении длины
рабочей волны возрастает зависимость работы РЛС от погодных условий
(дождя, грозы, колебаний листвы деревьев и т. п.), но вместе с тем
ослабляется влияние тумана и дымки.
4 Развитие вычислительной техники позволило создать и реализовать
микропроцессоры цифровой обработки сигналов. При обработке цифровых
сигналов радиолокатора используются алгоритмы цифровой фильтрации и
спектрального анализа (вычисление дискретного и быстрого преобразования
Фурье – ДПФ и БПФ), алгоритмы корреляционного анализа, обратной свертки,
специальные алгоритмы линейного предсказания. Требования к аппаратной
части цифровой обработки радиолокационных сигналов по быстродействию
составляют 109 умножений в секунду, а размеры преобразований
могут достигать до 214 комплексных точек для операции
фильтрации входных сигналов антенны (частоты сигналов от 10 МГц до 10
ГГц).
Далее
>>> |